A-Map System
A System for Custom, Artistic or Schematic Maps Visualization and Position Mapping
Abstract
The maps designed for specific applications evolve dramatically trying to address particular needs of those. The result of such evolution in many cases is a custom, schematic or artistic map representing general topology, but missing irrelevant details and distorting proportions in order to squeeze in more useful information and improve perception.
The proposed "A-Map" system will integrate the custom maps into conventional online mapping systems, deliver location awareness to the imprecise custom maps and provide simple and convenient way for users to publish and utilize such maps.
Contents
Position Visualization for Imprecise Maps
Introduction
The conventional geographic maps used for specific applications evolve dramatically trying to better address particular needs of those. The result of such evolution in many cases turned out to be imprecise map representing general topology, but omitting unimportant details and distorting proportions in order to improve perception and simplify the visual search for the relevant information. The first references to intentionally simplified maps are going back as far as the times of ancient Rome.
The figure 1 below shows examples of imprecise maps: a route description sketch; a portion of a custom made resort map; and a portion of a schematic Las Vegas strip map.
Figure 1. Examples of imprecise maps.
There are multiple use cases when imprecise maps are more suitable and easier to handle than their geographic counterparts, but they also suffer from common for all maps usability problems. The most difficult task for a user of any map is to recognize and create mental binding of the real world locations to their abstract representations given by the map.
The contemporary location aware devices could be of a great help in solving this problem, but they are conventionally used with geographic maps only. A system that provides perceptually correct visualization of the positioning data on imprecise maps and convenient way to deliver such maps to users would allow combining advantages of high customization with the convenience of the location awareness and the common for the contemporary mapping applications functionality.
A-Map Solution Overview
Overview
The “A-Map” solution is designed to solve the problem of custom maps delivery to the target audience and to bring the location awareness to the imprecise custom maps. The solution will have to feature “viewer” and “mapper” components.
The “A-Map viewer” responsibilities are:
- Detect availability of custom maps covering location user is focused on;
- Present user a choice to switch view to a custom map available locally or on the Internet custom maps server(s);
- Provide (when possible) the ability to display and track the geographic location on the custom map in the view.
The “A-Map mapper” responsibilities are:
- Provide an easy to use interface for registered users or businesses to upload custom maps and geographic coordinates linkage information to the Internet custom map servers or prepare standalone maps packages to upload directly to target devices;
- Provide an easy to use interface to create the coordinates linkage between the custom maps and the geographic coordinates;
- Perform all the necessary calculations to off-load the computational cost of mapping an arbitrary geographic position to imprecise custom maps for the “A-Map viewer”.
The diagram below shows the dataflow in the “A-Map” system.
The solution will have to (some extent) rely on the community and businesses to provide the content voluntarily. There are several drivers for creating such augmented custom maps by the community. For example, having local businesses listed on such maps is effectively an advertisement reaching multitude of the maps users. Big resorts, parks or stadiums might be interested in providing augmented navigation abilities within the boundaries of their territories just to have a competitive edge, and/or to advertise and attract customers to their internal facilities.
Use Case Example
Here is a hypothetical online use case example:
A resort personnel or a 3-rd party maps provider uploads a detailed custom map image file(s) for the resort and a set of location linkage points for that map to the custom maps online server (see figure 11 for an example of a portion of a custom map with linkage points). A user visiting the resort opens the Maps web site on a location aware device. The software detects that there is a custom map for the resort available and enables the view selection button (figure 2 left). When user clicks on the button a list of custom maps covering the location in focus is presented. User chooses the resort’s custom map to display. The custom resort map is loaded into view (figure 2 right) and user position is shown and tracked on that map until the view is switched back to the standard map.
Figure 2. Use case example.
The off-line use case is similar, but only the custom maps already stored on the device will be available.
Considerations
It is feasible that in some cases a custom map would not be bound to multiple points, but is just associated with a particular region on a map. In that case the custom map can still be shown to the user, but the position visualization on the map will not be available.
One of the most cumbersome parts of the A-Map system is the support for a reliable mapping of a geographic location to a point on an imprecise custom map (also further referred to as just “imprecise map”) basing only on a small set of binding points initially provided by the map supplier. That is the ability that gives it the edge in combining the convenience of the custom maps and the position visualization.
The following chapter discusses in more details and demonstrates how the “A-Map” system might address that problem.
Position Visualization for Imprecise Maps
Overview
The technique allowing position visualization for imprecise maps should be capable of converting any real world (altitude and longitude) coordinates from a given area into correspondent coordinates on the imprecise map. The correspondent coordinates should provide the most perceptually correct mapping of the position to the imprecise map.
The vast majority of the conventional geographic maps contain information for effective and simple mapping of the real world coordinates to the positions on the map. The latter allows us to consider the task of the technique being to perform mapping of points on a geographic map image presenting an area of interest into similar points on the imprecise map image representing the same area.
The figure 3 shows an example of a geographic map presenting some area of interest. The mesh of the blue points covers the area within where we would like to map positions to the imprecise map presented on the figure 4 (route sketch).
Figure 3. Geographic map of the area of interest.
The position mapping is based on a set of binding points (predefined mapped positions) shown in green. The binding points should generally be chosen by the person or software designing the imprecise map based on the design goals. For example, for a route sketch the binding points would include crossroads, landmarks and important route points. The example presented on the figures 3 and 4 limits the number of the binding points in order to simplify the case.
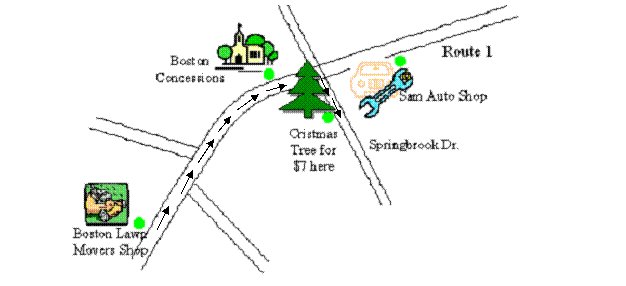
Figure 4. Route sketch.
Summarizing the above, for a given position on a geographic map the Position Visualization Technique should allow calculation of the correspondent position on the imprecise map. The calculation should be based on an arbitrary number of binding points, which coordinates are known on both the geographic and the imprecise maps. The position calculated should be perceptually the best match relative to that predefined set of the binding points.
Algorithm
The algorithm implementing Position Visualization Technique for “A-Map” system has two stages.
The first stage is performed once after user defines the set of binding points (in the “A-Map mapper” software). It uses the computationally expansive calculations to produce an additional set of points (a mesh). For each point in the mesh a correspondent matching positions on the imprecise map is calculated (let say imprecise map coordinates for the mesh of the blue points from the figure 3 are calculated). The calculated data then attached to the imprecise map.
The second stage is to be implemented in the “A-Map viewer” showing the map on a mobile device equipped with the position reporting software. The geographic position reported is visualized on the imprecise map using simple interpolation (for example linear) calculations using the nearest known mapped positions. The known mapped positions are all the predefined binding points and the points calculated during the first stage.
Algorithm Application Results
The application of the proposed algorithm to the case presented on the figures 3 and 4 yields results showed on the figure 5.
The predefined binding points set was:
{-10,-10} => {91,299-242};
{5,5} => {383,299-63};
{4,3} => {302,299-125};
{3, 5} => {236,299-76};
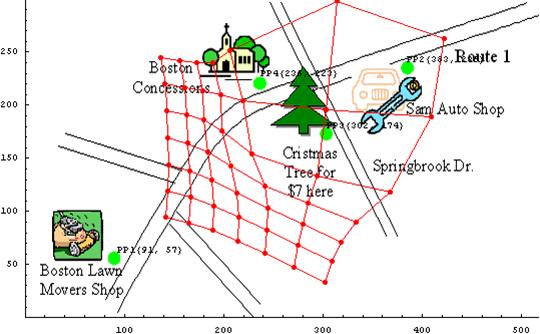
Figure 5. Transformed Mesh of Points.
Following several examples show properties of the algorithm by applying it to a small sets of binding points possessing particular features. Similarly to the previous examples, the green dots show the binding points, blue dots show a mesh of positions to be mapped to imprecise map and the red dots show the mapped to the imprecise map blue dot positions.
The example presented on figures 6 and 7 demonstrate how the algorithm handles relatively high rate rescaling of a map region.
Figure 6. High rate rescaling original map data.
Figure 7. High rate rescaling transformed map data.
The example presented on figures 8 and 9 shows the multiple region rescaling.
Figure 8. Multiple region rescaling original map data.
Figure 9. Multiple region rescaling transformed map data.
The example presented on figures 10 and 11 shows transformation of a portion of a standard street map to the correspondent portion of artistic imprecise map. Note that the map data is not well formed. There is an inconsistency in the crossroads marked by points 7 and 14 (mid-right).
Figure 10. Portsmouth downtown Delorme map.
Figure 11. Portsmouth downtown artistic map.
Conclusion
The “A-Map” system will allow users to publish and share custom imprecise maps for specific locations and will provide the ability to map a geographic location to a perceptually correct position on such a map. The following benefits would be brought by the system to the consumers:
- Convenience of customized maps combined with location visualization.
- Fast and easy way to convert the existent printable versions of the imprecise custom maps for parks, resorts, stadiums etc. into their electronic versions and instantly bring the location awareness to those maps.
- A convenient way to automatically present a detailed custom map to users that might needed it in the context of the conventional map and basing on the geographic location the user is interested in.
- A convenient way to keep up-to-date custom maps for quickly changing places.
- Fast and easy way to create and make available to the end users custom maps for temporary events.
- Possibility of further improvements (for example, embedded into custom maps URL mappings to allow navigating browser to online services directly from the map in the view).